CPU Scheduling with Deep Reinforcement Learning
CPU Scheduling with Deep Reinforcement Learning
This project develops a Deep Reinforcement Learning (DRL) model to optimize CPU scheduling, aiming to reduce turnaround time and outperform the traditional Round-Robin algorithm. The model uses Proximal Policy Optimization (PPO) to dynamically adjust task priorities for enhanced scheduling efficiency.
Plz refer to the code for a complete picture here. I have only explained important concepts!
PPO Architecture
Policy Network
- Input: Current state \(s_t\)
- Output: Action probabilities \(pi(a_t / s_t)\)
Value Network
- Input: Current state \(s_t\) \(a_t\)
- Output: Value estimate \(V(s_t)\)
Data Store
- The agent processes the environment through the policy network, producing a probability distribution over actions.
- Selected actions, states, rewards, and probabilities, are stored in a data store for every batch.
Future Rewards Calculation
Future rewards, also known as Return-to-Go are computed recursively as: \(G*t = r_t + \gamma G*{t+1}\)
This is implemented using the cumulative discounted reward formula:
discounted_reward = rew + (discounted_reward * self.gamma)Expanded Formula: \(G*t = r_t + \gamma r*{t+1} + \gamma^2 r\_{t+2} + \dots\)
Code Implementation
def compute_rtgs(self, batch_rews):
batch_rtgs = []
for ep_rews in reversed(batch_rews):
discounted_reward = 0
for rew in reversed(ep_rews):
discounted_reward = rew + (discounted_reward * self.gamma)
batch_rtgs.insert(0, discounted_reward)
return torch.tensor(batch_rtgs, dtype=torch.float)Advantage Function
The advantage function measures how much better an action \(a_t\) is compared to the expected policy behavior: \(A_t = G_t - V(s_t)\)
- \(G_t\): Future rewards, computed in the
compute_rtgsmethod. - \(V(s_t)\): Value estimate obtained from the critic network.
Advantage Calculation
Advantage is computed in the PPO learn method:
# Calculate Advantage
A_k = batch_rtgs - V.detach()batch_rtgs: Precomputed future rewards usingcompute_rtgs.V.detach(): Ensures the critic network’s gradients do not interfere with the calculation.
Code Implementation
# todo Generalized Advantage Estimation GAE is a method to estimate the advantage function, which represents how much better an action is compared to the average action in a given state
V, _ = self.evaluate(batch_obs, batch_acts)
def evaluate(self, batch_obs, batch_acts):
# query critic network for value V for each obs in batch_obs after encoding
# batch_obs = self.obs_enc(batch_obs)
V = self.critic(batch_obs).squeeze()
# print('eval', V.detach().shape)
# get log probabilities
mean = self.actor(batch_obs)
dist = MultivariateNormal(mean, self.cov_mat)
log_probs = dist.log_prob(batch_acts)
return V, log_probsClipped Surrogate Loss
The clipped surrogate loss ensures stable policy updates by constraining deviations from the previous policy.
Key Components
Probability Ratio \(r_t(\theta)\): \[r*t(\theta) = \frac{\pi*\theta(a*t | s_t)}{\pi*{\theta\_{\text{old}}}(a_t | s_t)}\]
Clipping Constraint: \[\text{clip}\left( r_t(\theta), 1-\epsilon, 1+\epsilon \right)\]
Objective Function: \[\mathcal{L}^\text{CLIP} = \mathbb{E}\left[ \min\left(r_t(\theta) A_t, \text{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) A_t\right) \right]\]
Policy Loss
The actor network uses the clipped surrogate loss for optimization:
# Compute probability ratios
log_probs = self.actor(batch_obs).log_prob(batch_actions)
old_log_probs = batch_log_probs.detach()
ratios = torch.exp(log_probs - old_log_probs)
# Clipped surrogate loss
surr1 = ratios * batch_advantages
surr2 = torch.clamp(ratios, 1 - self.clip, 1 + self.clip) * batch_advantages
actor_loss = -torch.mean(torch.min(surr1, surr2))
# Backpropagate and optimize
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()Explanation
Log-Probabilities:
- Current policy: \[\log \pi\_\theta(a_t | s_t)\]
- Old policy: \[\log \pi*{\theta*{\text{old}}}(a_t | s_t)\]
Probability Ratios: \[r*t(\theta) = \exp(\log \pi*\theta - \log \pi*{\theta*{\text{old}}})\]
Surrogate Objectives:
- Original objective: \[r_t(\theta) A_t\]
- Clipped objective: \[\text{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) A_t\]
Loss Minimization:
- The minimum of these ensures stability during training: \[\text{Loss} = -\mathbb{E}\left[\min\left(r_t(\theta) A_t, \text{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) A_t\right)\right]\]
Loss Optimization
The actor network updates using the calculated loss:
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()The critic network is trained similarly, minimizing the squared error between \(G_t\) and \(V(s_t)\).
Neural Network Architecture
The implementation uses a feed-forward neural network with the following structure:
import torch
from torch import nn
import torch.nn.functional as F
import numpy as np
class FeedForwardNN(nn.Module):
def __init__(self, in_dim, out_dim):
super(FeedForwardNN, self).__init__()
self.layer1 = nn.Linear(in_dim, 64)
self.layer2 = nn.Linear(64, 64)
self.layer3 = nn.Linear(64, out_dim)
def forward(self, obs):
if isinstance(obs, np.ndarray):
obs = torch.tensor(obs, dtype=torch.float)
# todo applies relu activation to the output of the layer
activation1 = F.relu(self.layer1(obs))
activation2 = F.relu(self.layer2(activation1))
output = self.layer3(activation2)
return outputCustom Gym Environment (PrioritySchedulerEnv)
The custom environment models a priority-based process scheduler where processes are dynamically managed based on their arrival time, instruction count, and assigned priority. This environment provides structured data for PPO to learn effective scheduling strategies.
Observation Space
The observation space is a matrix of shape (encoder_context + 1, 5). It provides the agent with state information, including:
- Current process: \(\text{PID}, \text{arrival time}, \text{total instructions}, \text{remaining instructions}\)
- Priority queue state for the current scheduling context.
Code
import gymnasium as gym
import numpy as np
class PrioritySchedulerEnv(gym.Env):
def __init__(self, encoder_context=5, max_priority=10):
super().__init__()
self.encoder_context = encoder_context
self.max_priority = max_priority
# Observation space: (encoder_context + 1 processes, 5 features each)
self.observation_space = gym.spaces.Box(
low=0,
high=np.inf,
shape=(encoder_context + 1, 5),
dtype=np.float32
)
# Action space: Assign priority levels (0 to max_priority-1)
self.action_space = gym.spaces.Discrete(max_priority)
self.reset()Action Space
The action space is discrete, representing the priority levels that can be assigned to processes. The range is \((0)\) to {max_priority} - 1.
Reward Function
The reward function balances high throughput and low turnaround times:
- Positive Reward: \(100 \times \text{completed processes}\)
- Penalty: \(-\text{sum(turnaround times)}\)
Formula: Reward Function
\[ \text{Reward} = 100 \times \text{len(completed processes)} - \sum(\text{turnaround times}) \]
This encourages the agent to:
- Maximize completed processes.
- Minimize the turnaround time for each process.
Code: Reward Function
def calculate_reward(self):
throughput_bonus = 100 * len(self.completed_processes)
latency_penalty = -sum(p[1] for p in self.completed_processes) # Sum of turnaround times
return throughput_bonus + latency_penaltyExample Scenarios
Fast Completion:
- Completed Processes:
[(0, 5), (1, 6)] - Reward: \[200 - (5 + 6) = 189\]
- Completed Processes:
Slow Completion:
- Completed Processes:
[(0, 15), (1, 18)] - Reward: \[200 - (15 + 18) = 167\]
- Completed Processes:
Priority Queue Structure
Processes are managed in a priority queue:\[{priority}, [\text{PID}, \text{arrival time}, \text{total instructions}, \text{remaining instructions}]\]
self.execution_queue.put(
(assign_priority, (self.processes[self.data_pointer]))
)assign_priority: This value is determined based on the output of the PPO algorithm (using the provided action). self.processes[self.data_pointer]: Contains the process details such as PID, arrival time, instructions, and remaining instructions. Sorting by Priority: The PriorityQueue ensures processes are sorted automatically based on priority, with lower values representing higher priority.
self.processes[self.data_pointer]: Contains the process details such as PID, arrival time, instructions, and remaining instructions.
The PriorityQueue ensures processes are sorted automatically based on priority, with lower values representing higher priority
Example Queue
(2, [0, 1, 10, 8]) # Priority 2, PID 0, 8 instructions remaining
(3, [2, 7, 12, 12]) # Priority 3, PID 2, 12 instructions remaining
(5, [1, 3, 8, 8]) # Priority 5, PID 1, 8 instructions remainingStep Function
The step method handles environment dynamics:
- Updates process states based on the selected action (priority assignment).
- Manages process execution and computes rewards.
Code: Step Method
def step(self, action):
# Update priority of the current process
process = self.current_process
process_priority = action
self.add_to_queue(process, process_priority)
# Execute the highest-priority process
next_process = self.get_next_process()
if next_process:
_, process_data = next_process
process_data[3] -= 1 # Decrement remaining instructions
if process_data[3] == 0: # Process completed
self.completed_processes.append((process_data[0], self.current_time - process_data[1]))
# Increment time and compute reward
self.current_time += 1
reward = self.calculate_reward()
# Update observation (current process + priority queue context)
observation = self.get_observation()
done = len(self.priority_queue) == 0
return observation, reward, done, {}Multivariate Normal Distribution
PPO uses a multivariate normal distribution for action selection, ensuring diverse priority assignments while preserving stability.
Formula
\[ \pi(a_t | s_t) = \frac{1}{\sqrt{(2\pi)^k |\Sigma|}} \exp\left(-\frac{1}{2}(a_t - \mu)^T \Sigma^{-1} (a_t - \mu)\right) \]
Where:
- \(mu\): Mean vector (policy’s output).
- \(Sigma\): Covariance matrix.
Code: Action Sampling
def get_action(self, obs):
# encode the observations and query the actor for mean action
# obs = self.obs_enc(obs)
mean = self.actor(obs)
# create multivariate normal distribution
dist = MultivariateNormal(mean, self.cov_mat)
# sample action from distribution
action = dist.sample()
log_prob = dist.log_prob(action)
# return detached action and log prob
return action.detach().numpy(), log_prob.detach().numpy()Environment Initialization
The environment initializes with the following:
- Processes: A batch of random processes with arrival times and instruction counts.
- Priority Queue: Starts empty, populated dynamically during runtime.
Code: Initialization
def reset(self):
self.priority_queue = []
self.completed_processes = []
self.current_time = 0
# Generate random processes
self.processes = [
[i, np.random.randint(0, 10), np.random.randint(5, 15), np.random.randint(5, 15)]
for i in range(self.encoder_context + 1)
]
self.current_process = self.processes.pop(0)
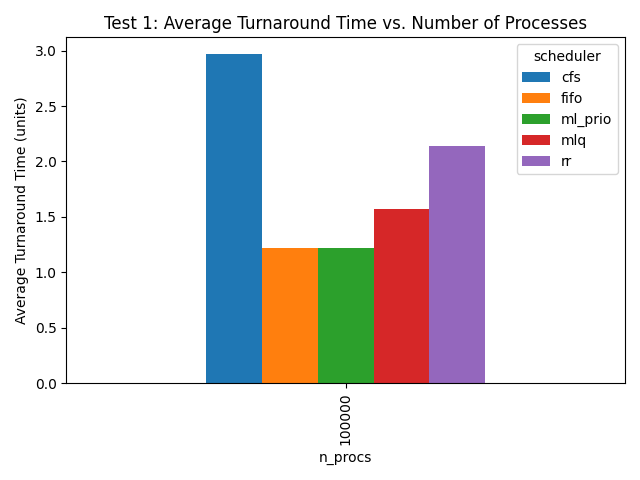
return self.get_observation()Result
This way we can Train a Deep-RL Model to outperform classic algorithms like round robin.